服务热线
WAM机器人遥操作技术
WAM机器人遥操作装置可以借助网络,进行机器人的远程控制,借助先进的力感知、力反馈和触觉再现技术,可以适用于远程手术、远程诊断、虚拟现实、多媒体教研等诸多应用领域。
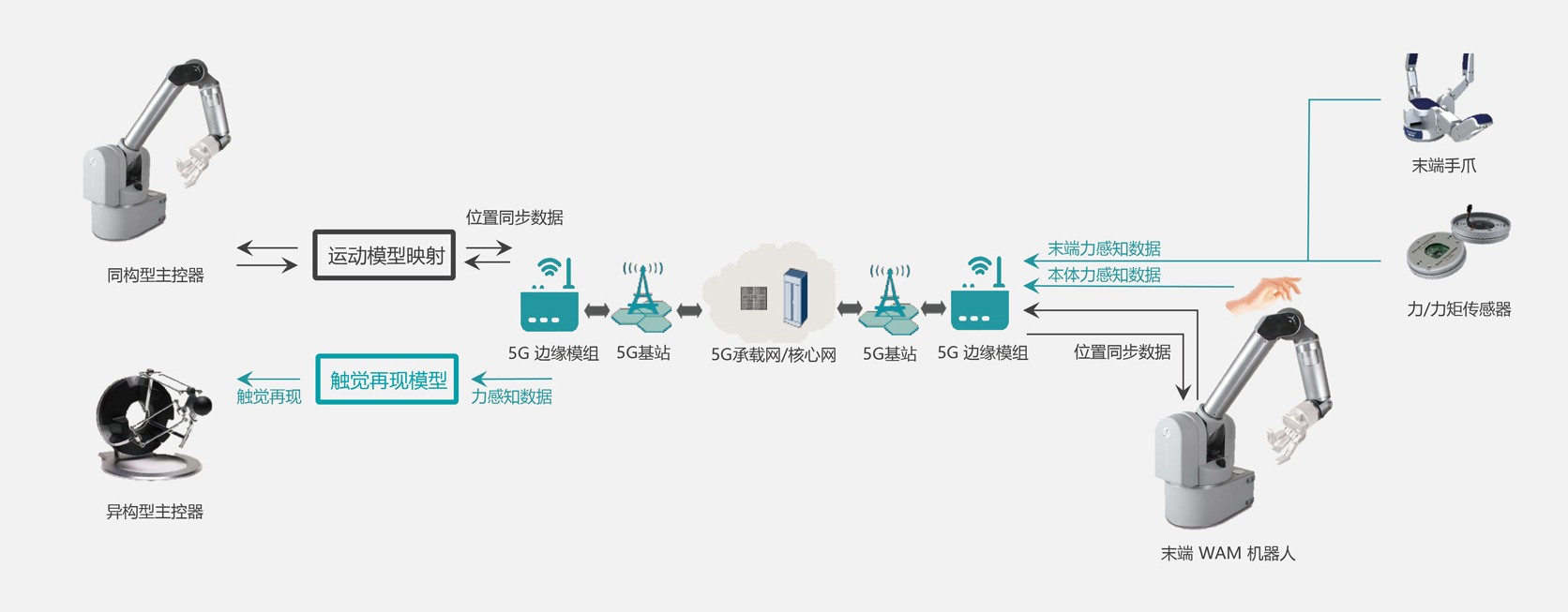
遥操作及其过程中的力感知、力反馈和触觉再现
WAM机器人遥操作装置不但可以沿X轴、y和2轴力反馈,还能提供3个转动自由度的转矩力反馈:偏航、俯仰和侧滚,用户可以遥控远程机器人的运动路径,感觉远端的碰撞、反作用力,及更加精准的触觉再现。
基于机器人遥操作技术的医疗服务
WAM机器人遥操作技术,在诸多医疗培训和科研应用中发挥着重要的作用。医生可对患者进行远程诊断通过精确的外科工具进行临床手术。同时虚拟患者可为基础的医疗培训或为医学生在临床前应用提供重要的经验。
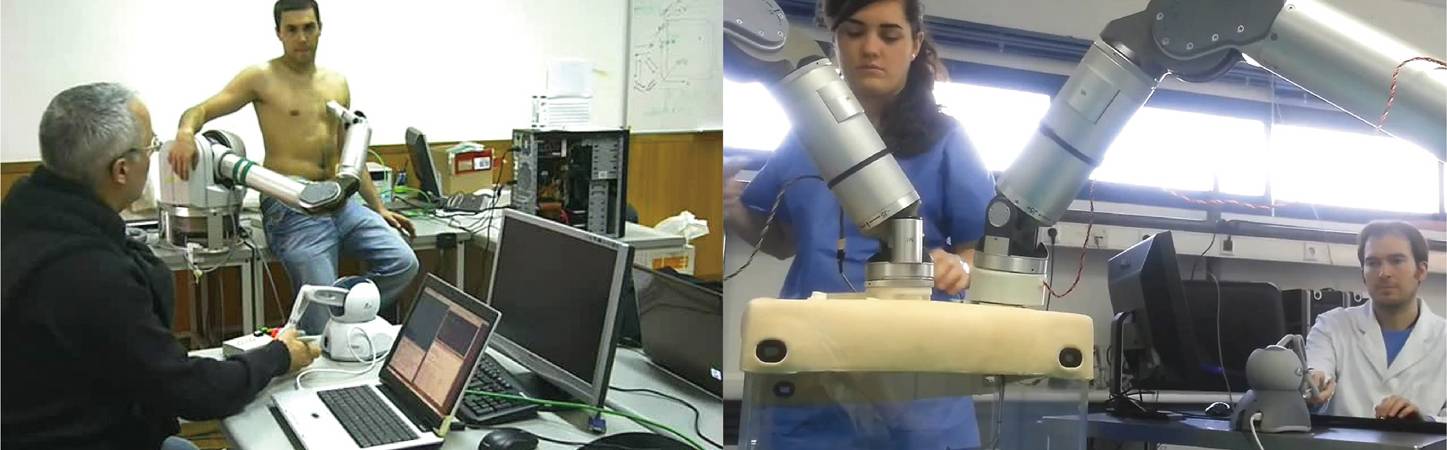
基于机器人遥操作技术的康复服务
WAM机器人遥操作技术,在康复医疗领域同样有着很重要的应用,康复医生可以通过遥操作,结合力感知与力反馈系统进行远程康复医疗服务,护理人员也可对失能患者进行远程日常照护和护理.


性能特点:
优秀的反向驱动能力
基于绳驱技术,WAM 机器人天然具有极其优秀的反向驱动能力,用户可以轻松拖拽机器人进行运动。
柔顺、安全
绳驱技术使得WAM天然具有优秀的柔顺性和安全性,更加适用于人机交互场景。
零摩擦力
WAM绳驱单元完成预紧操作后,各关节不存在滑动摩擦,可显著降低各关节摩擦阻力。
零减速器间隙
WAM 绳驱单元克服了传统机器人中减速器的齿轮间隙问题,故具有更好的传动精度。
无需润滑、更洁净、更安静
WAM绳驱单元表面无需任何润滑油脂,比传统机器人的齿轮传动更洁净、更安静,更柔顺。
结构紧凑、更轻巧
大部分电机部署于近基座端,极大减少了整机运动部件的质量,较传统机械臂更加轻巧。
