服务热线
一、名词介绍
 1.力触觉技术
1.力触觉技术
定义: 所谓的力触觉技术开始是应用于军事上的一种虚拟现实技术,它利用机械表现出的一种反作用力,将虚拟环境中的力的数据通过力反馈设备表现出来,可以让用户有一种身临其境的感觉。
2.遥操作技术
指在相关机器人控制中把人类操作包含在控制回路中,任何的上层规划和认知决定都是由人类用户下达,而机器人本体只是负责相应的实体应用。当机器人处理复杂的感知和大量任务时,在快速做出决策和处理极端情况时,遥距操作远远优于智能编程。
3.虚拟现实技术
虚拟现实技术囊括计算机、电子信息、仿真技术,其基本实现方式是计算机模拟虚拟环境从而给人以环境沉浸感。随着社会生产力和科学技术的不断发展,各行各业对VR技术的需求日益旺盛。VR技术也取得了巨大进步,并逐步成为一个新的科学技术领域。
二、意义
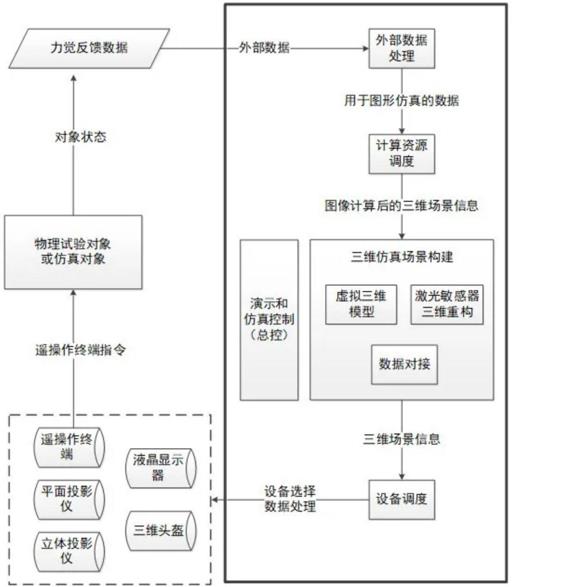
 在特定环境下,远程操控系统加入力觉反馈能够使操作者感受到真实的操纵感觉,实现力觉临场感.实时把握被控对象运动状态,及时对控制指令做出相应的调整.保证被控对象在远程操控下准确可靠运行,很大程度上能够降低人员操作失误率,增加操作者操控的安全性,因此对基于力反馈的航空航天远程操控系统的研究具有十分重要的现实意义。
在特定环境下,远程操控系统加入力觉反馈能够使操作者感受到真实的操纵感觉,实现力觉临场感.实时把握被控对象运动状态,及时对控制指令做出相应的调整.保证被控对象在远程操控下准确可靠运行,很大程度上能够降低人员操作失误率,增加操作者操控的安全性,因此对基于力反馈的航空航天远程操控系统的研究具有十分重要的现实意义。
通过仿真分析验证控制方法的有效性,保证转向系统力反馈的准确性为操作者提供可靠的感知信息,同时对数据通信、位置跟踪等模块进行功能测试,验证各模块程序设计的合理性.保证数据通信、位置跟踪、数据显示的准确性,实现远程操控系统软便件的协调与统一,最终实现系统准确的力觉反馈,增强对远程机械臂控制的有效性满足基于力反馈的远程操控系统的既定要求。
基于在VR头盔中双目远程立体成像的真实空间反馈体验,通过三维可视化技术构建虚拟的机械臂与实验目标,以及力反馈设备的力矩操作体验,使远程操控机械警如同使用自己的手臂去完成任务一样清晰具象,操作过程更加精确可靠。通过三维全景仿真验证系统,实验者可以在立体环境中使用力反馈设备驱动机器人进行实验操作,并可以完成模拟实物仿真实验、虚拟仿真实验、混合仿真实验多和实验状态,为后续实操提供实验依据。

1.远程操控:在现实环境中实时控制一个远端指令生成设备(机械手臂+手爪)对实物进行操作,同时感受远端指令生成设备和环境的接触力。
2.基于虚拟现实的培训: 在虚拟现实环境中实时仿真和控制虚拟的远端指令生成设备对虚拟物体进行操作。
3.基于混合现实的培训: 在现实环境中实时控制一个远端指令生成设备对虚拟物体进行操作,同时感受远端指令生成设备和虚拟物体的接触。
三、项目分析
根据用户需求调研,结合项目背景分析,用户主要实现实物仿真实验、虚拟仿真实验、混合仿真实验三种应用模式。
其中,在多人协同任务时如创建的实验任务为远程实物仿真实验模式,则所有接入用户必须都为远程实物仿真实验;而空间虚拟仿真实验、混合仿真实验两种模式可在多人协同任务时混合应用。

实物仿真实验
基于在VR头盔中双目远程立体成像的真实空间反馈体验,以及力反馈设备的力矩操作体验,使远程操控机械臂如同使用自己的手臂去完成任务一样清晰具象,操作过程更加精确可靠。
 虚拟仿真实验
虚拟仿真实验
虚拟仿真实验,通过三维可视化技术构建虚拟的机械臂与实验目标并可将它们部署于依托真实的环境数据支撑的虚拟真是环境中,通过真实仿真数据驱动其运行,实现更加符合真实作业环境的仿真实验。
虚拟仿真实验模式,可支持现实中存在与不存在的各种机械手臂和实验目标,在验证机械臂对目标运动干涉时,不受地面实验设备限制,可进行最接近真实的设备姿态变化。
将真实的设备 (机械臂)与虚拟的目标设备融汇在一个空间中,并进行接触物理仿真计算,实现虚实融合的仿真实验。
应用虚拟仿真技术,实现真实机械臂与虚拟目标物体无缝结合,使实验室具备极大的实验任务兼容性,并降低了实验成本、减少实验时间。
